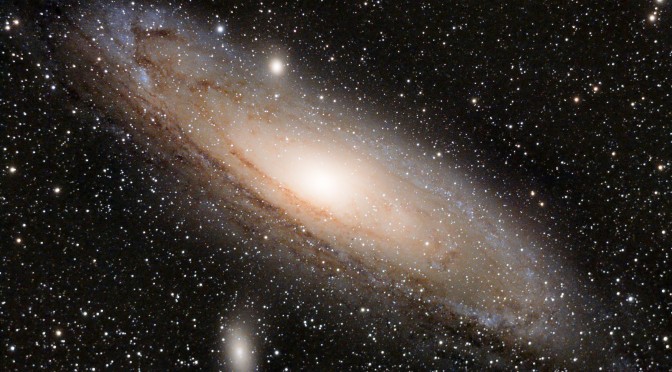
La Galaxia de Andrómeda, también conocida como Objeto Messier 31, Messier 31 o NGC 224, es una galaxia espiral gigante. Es el objeto visible a simple vista más alejado de la Tierra. Está a 2,5 millones de años luz (775 kpc) en dirección a la constelación de Andrómeda. Es la más grande de las galaxias del Grupo Local, que consiste en aproximadamente 30 pequeñas galaxias más tres grandes galaxias espirales: Andrómeda, la Vía Láctea y la Galaxia del Triángulo.

Tiene una masa calculada de entre 300.000 y 400.000 millones de masas solares: aproximadamente una vez y media la masa de la Vía Láctea. Con las mejoras en las mediciones y los datos obtenidos algunos científicos creen que la Vía Láctea contiene mucha más materia oscura y podría ser más masiva que M31. Sin embargo, observaciones recientes del Telescopio espacial Spitzer revelaron que la M31 contiene un billón (10^12) de estrellas, excediendo por mucho el número de estrellas en nuestra galaxia.
La galaxia se está acercando a nosotros a unos 140 kilómetros por segundo y se cree que de aquí a aproximadamente 3.000 millones a 5.000 millones de años pudiera colisionar con la nuestra y fusionarse ambas formando una gigante elíptica.
Wikipedia
Sigue leyendo Galaxia de Andrómeda M31