Gran estructura de polvo interestelar con alguna zona de formación de estrellas y que contiene varias nebulosas oscuras que forman un aro en la constelación de Cefeo limitando con Draco (Cefeo tiene una cantidad infinita de nebulosas oscuras, a cual más bonita).
El aro está compuesto por LDN 1147, LDN 1152, LDN 1157… y está situado a unos 1600 millones de al, muy cerca de una de las grandes protagonistas de esta constelación, la nebulosa Iris.
En la parte inferior derecha, en la parte que más sobresale hacia el este, veréis que hay un pequeño punto rojo. En su interior hay una protoestrella en contracción cuyas ondas de choque generan la nebulosa de reflexión bipolar variable llamada nebulosa de Gyulbudaghian (1/1.5’). Como curiosidad, decir que dicha nebulosa cambia de forma y brillo a lo largo de los meses y años. Parece ser el borde exterior de una capa en forma de embudo que entra en la nube molecular.
Fue descubierta en 1746 por Philippe Loys de Cheseaux, que más parece un nombre artístico que uno real, unos meses antes de que lo hiciera por su cuenta Messier. Se encuentra en uno de los ricos campos de estrellas de la Vía Láctea en Sagitario. De hecho, la imagen tiene una importante reducción de estrellas para que se pueda apreciar mejor. Puesto que tiene una magnitud visual de 6, es visible a simple vista desde latitudes bajas (desde Alcoy queda muy baja en el horizonte) en buenas condiciones de observación. El núcleo de la nebulosa, de color azulado, apunta hacia el oeste a otra zona de nebulosidad débil y que encierra una zona oscura llamada popularmente “Boca del Pez”.
En la parte superior de la imagen, centro un poco a la derecha, está el cúmulo abierto NGC6596, muy poco concentrado.
El color general de la Nebulosa es rojizo, debido a la luz emitida por el hidrógeno caliente excitado por las estrellas que se han formado en su interior. Sin embargo, la región más brillante de la nebulosa es de un azul casi blanco, resultado de la emisión de luz desde el gas más caliente y mezclado con reflejos de luz estelar brillante del polvo. La distancia estimada es de unos 5.500 años luz, muy próxima a M16, la Nebulosa del Águila. Aunque la parte visible tiene unos 15 al de diámetro, la nube gaseosa total se extiende, al menos, a unos 40 años luz.
En el interior de la nebulosa aparecen una especie de bolsillos densos más resistentes al ataque de radiación que la nube de alrededor, pareciendo como esculturas en las paredes de la propia nube. La presión de las puntas de las ondas puede desencadenar la formación de nuevas estrellas en su interior.
En cuanto al aspecto técnico, me ha supuesto un doble reto: el primero, que es la primera vez que proceso usando filtro de sulfuro, en vez de utilizar un canal sintético para él y el segundo, al igual que Orión, la parte central de la nebulosa es increíblemente brillante, saturándose enseguida, por lo que ha sido procesada usando métodos de HDR.
Las tomas han sido:
5 X 300” de Ha
105 X 300” de OIII
50 X 300” de SII
Todo ello con una venerable ASI 1600 MC con dos filtros (uno por noche) duales: Ha-OIII de Laida Optics y un OIII-SII Color magic de la serie C, de Askar.
Tubo: TS Apocromático de 80mm trabajando a 380 mm de focal.
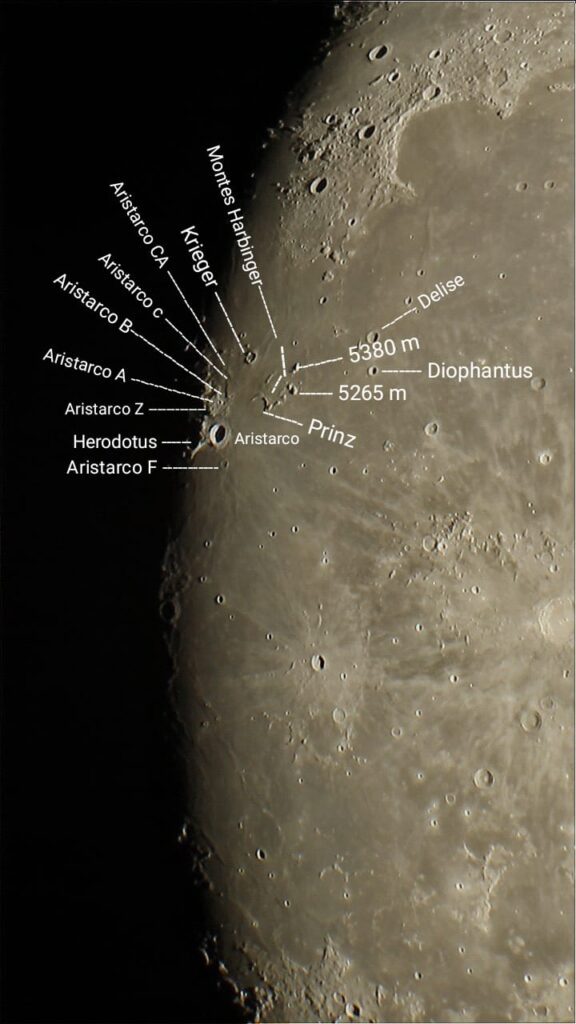
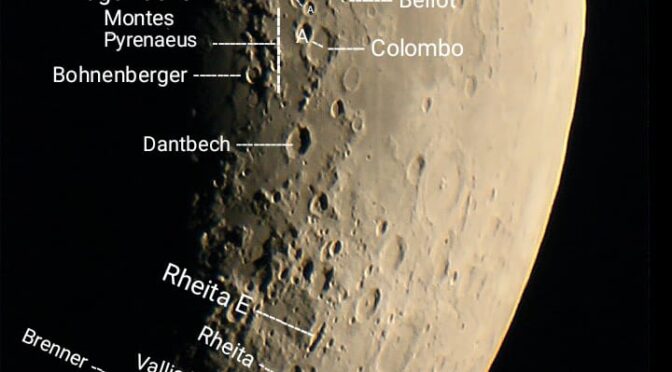
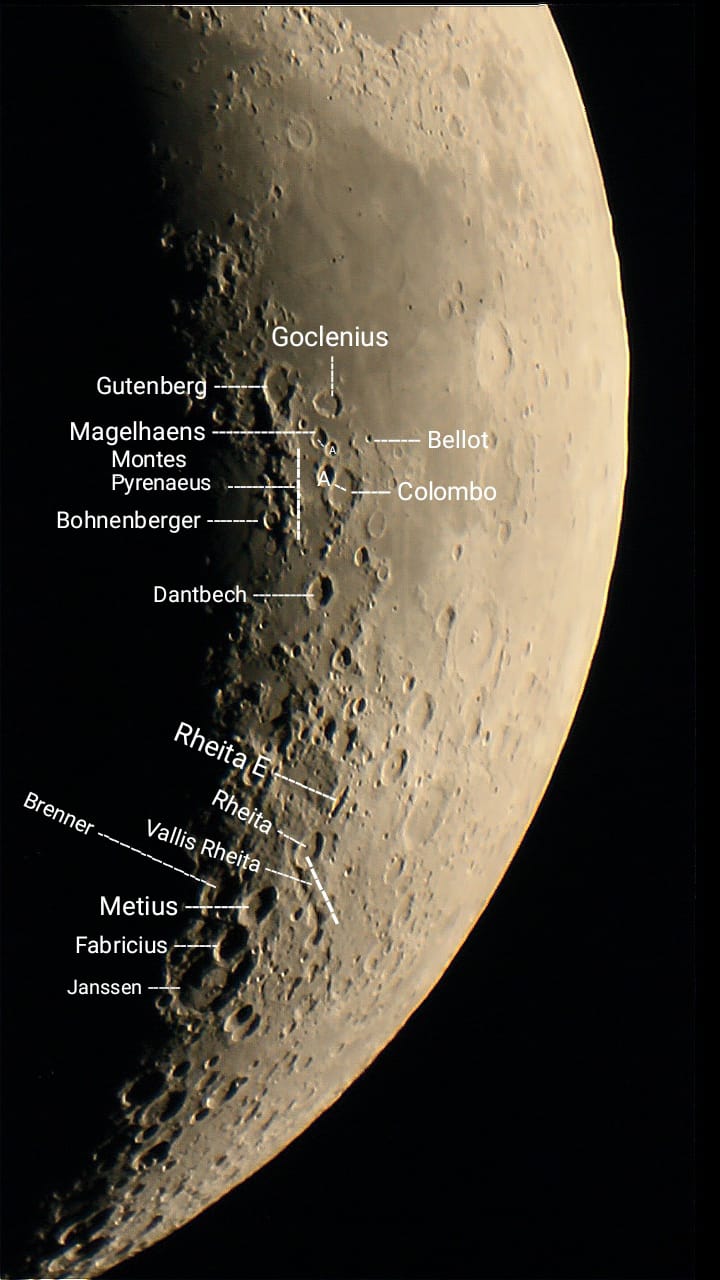
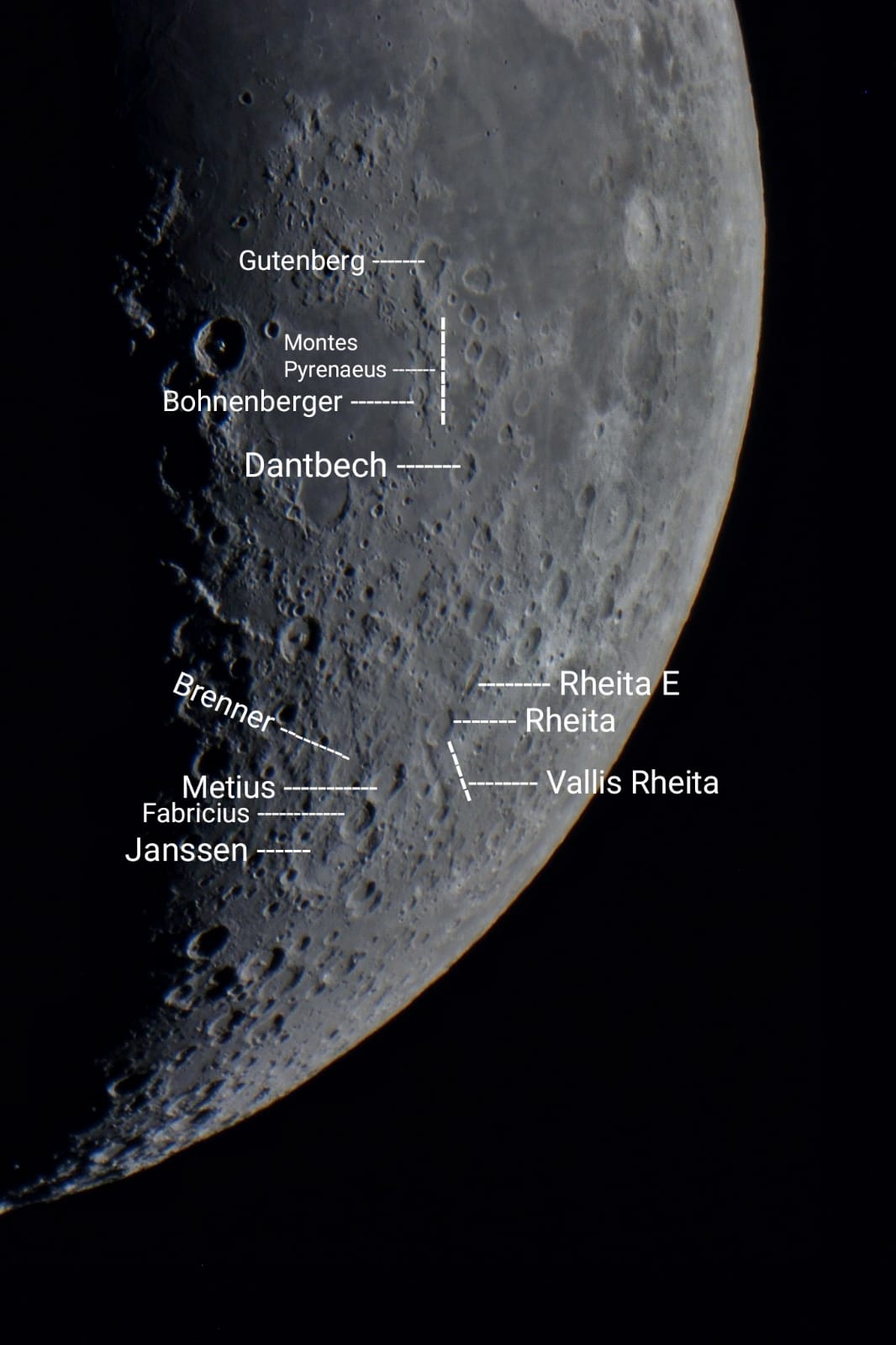
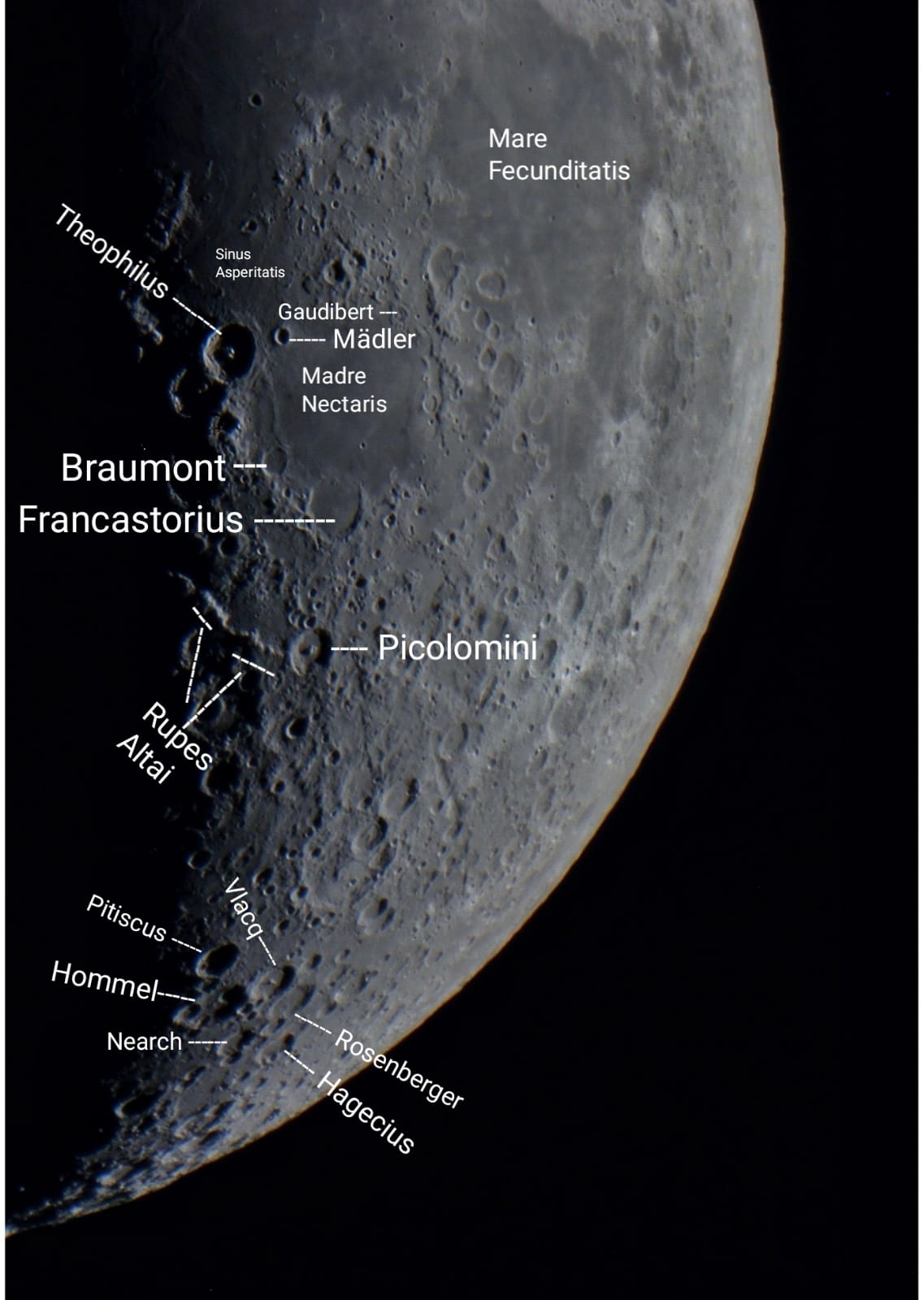
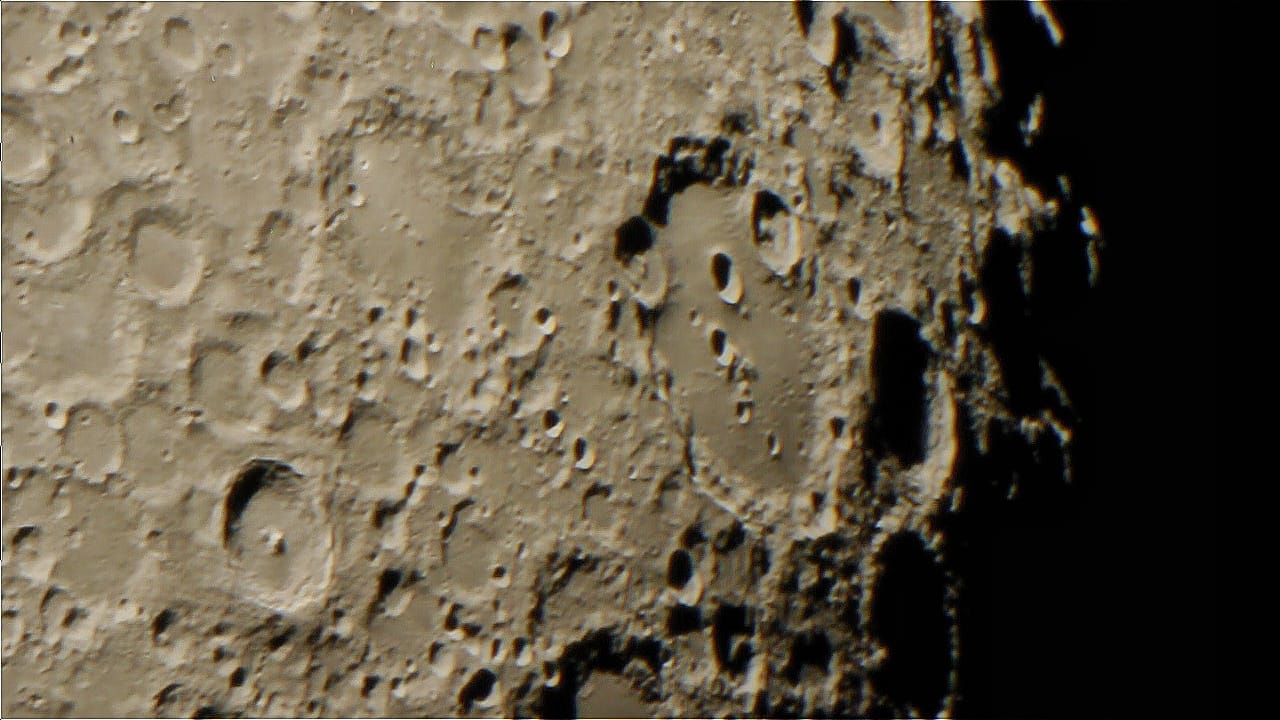
Nuestro compañero Tomás Merino Peiró nos envía estas dos fotos donde se puede observar como las diferentes fases de la luna van haciendo visible uno de los accidentes geográficos de la Luna, el Vallis Rheita.
El Vallis Rheita es un valle lineal situado en la cara visible de la Luna. Está ubicado en el cuadrante sureste y está orientado radialmente hacia el noreste con respecto al Mare Nectaris, al igual que el Vallis Snellius, con el que parece compartir un origen común.
El centro del valle se encuentra en coordenadas selenográficas 42.5 Sur y 51.5 Este, y tiene una longitud de 445 km. En su máxima extensión, este valle tiene un ancho de aproximadamente 30 km, pero se estrecha a 10 km en el extremo sureste. Es el segundo valle más largo de la cara visible de la Luna, siendo superado tan solo por el vecino Vallis Snellius.
DDO 47 (UGC 3974), una galaxia enana irregular. No he encontrado ninguna foto amateur de ella en la web, así que la he procesado a la gana. Se encuentra a unos 4 Mpc de distancia de nosotros (13 millones de años-luz). Su tamaño es de solo unos 500 pc (1630 a-l). Las galaxias enanas irregulares, a diferencia de las esferoidales, son ricas en gas. Tienen por ello una intensa formación estelar, y las estrellas jóvenes y masivas suelen producir un intenso color azulado. Sin embargo contienen menos hidrógeno neutro (HI) que las espirales masivas. Las explosiones de supernovas desplazan el gas y forman agujeros HI, en cuyos márgenes se concentra el hidrógeno ionizado (HII). DDO 47 tiene estas características, aunque los aficionados no veremos la señal de HI dado que solo emite en ondas de radio de 21 cm. No se si la distribución periférica de HII en los agujeros HI es responsable de la apariencia hereterogénea de la señal roja en la galaxia. Las galaxias enanas son ricas en materia oscura. Se cree que el 80% de la masa de DDO47 es materia oscura.
Como objeto fotográfico DDO 47 es pequeño, con un diámetro mayor de solo 3.7’ de arco. También es débil, con una magnitud aparente de 13.5. El 19 de abril inicié las tomas con DDO 47 a 60º de altitud, pero el seeing no era favorable y los días pasaban con poco rendimiento. Desde el 18 de mayo la turbidez del horizonte ya no permitió continuar. No obstante pude completar (con bastante desesperación) 15 h 26m de tomas aceptables en LRGB, y 3 h 33m en Ha. Procesé por separado y sin estrellas los master RGB, L y Ha, realizando la fusión de color tras el estirado, y la suma de estrellas al final del proceso. Esto quiere decir que el color puede ser el producto del consumo de ciertas lianas. El color dominante es el azul, como es propio de las galaxias enanas irregulares. Tanto en el disco como en el halo se intercalan tonos rojizos, realzados en algunos puntos al añadir el master Ha. Los objetos rojos situados al oeste se identifican en el Wide-Field Infrared Survey Explorer como un cluster de galaxias.
Abell 39 es una preciosa (y pequeña) nebulosa planetaria situada en la constelación de Hércules y a unos 7000 años luz de distancia de la Plaza de España (alguna que otra fuente dice que solo 3800). De hecho, su tamaño de 2.8” es demasiado pequeño para que pueda sacar detalles con la focal de mi newton (775 con el corrector de coma), pero me pareció tan bonita, que no puede resistir el ir a por ella. Dicho lo cual, hay que decir que es una de las esferas más grandes de nuestra galaxia, con un diámetro de 2.5 años luz.
La nebulosa se formó cuando la estrella que hay en su centro (actualmente de magnitud 15,7 y evolucionando hacia una enana blanca) expulsó hace 11.000 años su capa más externa, formada en su mayor parte por átomos de oxígeno, lo que le dan su característico tono azulado.
Es de una simetría casi perfecta, aunque su lado sur en la imagen tiene casi un 50% más de luminosidad que el opuesto. Se pueden apreciar, además, irregularidades en su superficie, con zonas más oscuras que otras.
Como curiosidad, decir que la aparente estrella amarillenta que hay a las 15:00 de lo que sería la esfera del reloj, es realmente una galaxia que se ve a través de la nebulosa, pero, lamentablemente, más allá del poder de resolución de mi telescopio/cámara.
La imagen es el resultado de la integración de 140 tomas de 180 segundos con el filtro L-Extreme, newton F4 de 8 pulgadas y cámara QHY269C.
La nebulosa PuWe1 es la segunda nebulosa planetaria en tamaño después de la nebulosa Helix. Tiene un diámetro de 20’, un tamaño que compite con el de la Luna. Sin embargo su brillo es tremendamente débil, lo cual la convierte en un objetivo fotográfico difícil. Se cree que es una nebulosa muy vieja dado su tamaño y debilidad. Pese a ello conserva su forma redonda. Su estrella central es una enana blanca de magnitud 15.5 (WD0615+556) que pertenece a un par rojo/azul visible en el centro . La señal HII es mucho mayor que la OIII (brillo superficial 23.7 vs. 26.3 msg/arcsec2).Las tomas fueron de cinco minutos. En las tomas HII se adivinaba la nebulosa, y en las tomas OIII solo parecía haber estrellas. Tras el apilado, la imagen HII mostraba un frente de choque bastante uniforme en la periferia, algo deshilachado en el sector suroeste, con un centro más débil en el que hay débiles bandas en dirección NW-SE. En la imagen OIII existía un anillo periférico algo más interior que el HII y un débil refuerzo central. En el apilado de tomas de 30” en R, G y B. la estrella doble central se distingue sorprendentemente bien. En el campo hay un buen número de galaxias, cuyo color no pude conservar en la composición HOO. En algunas imágenes (ver R. Carande) se ha observado la existencia de un halo periférico . Revisé mi máster inicial HII por si el procesado hubiera eliminado su rastro, pero solo encontré las débiles nubes que se insinúan en la imagen final a las 9h y a las 4:30h. Hacer tomas de 5 minutos se ajusta bien a la calidad de mi equipo y de mi cielo, pero en objetos tan débles los master son difíciles de procesar y probablemente pierdan información.
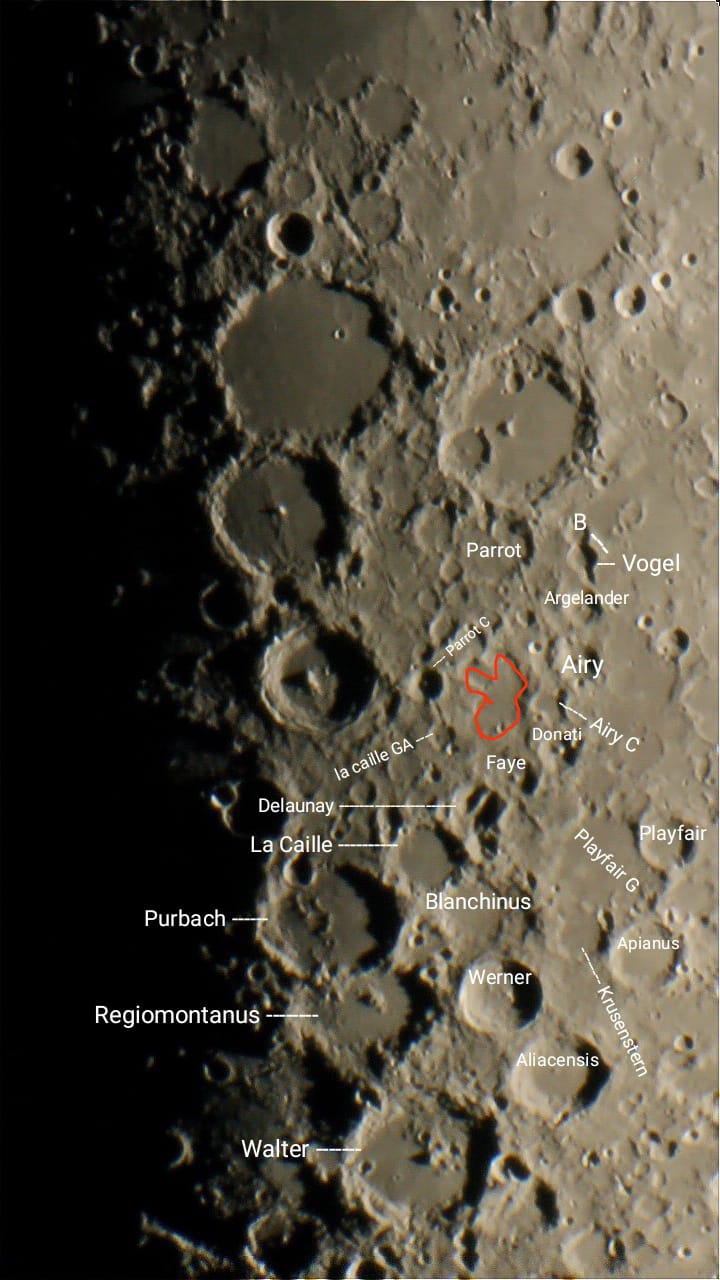
La Lluna d’ahir, el cràter Delaunay té una paret central que el parteix amb dos pràcticament pel centre. Entre el cràter Parrot C i La Caille GA hi ha un canal que els uneix, no he pogut trobar enlloc si té algun nom. Al costat d’aquest dos hi ha un pla de forma irregular (l’he marcat amb vermell) tampoc he trobat el nom si és que té nom, si algú pot trobar alguna referència o el nom que ho diga.
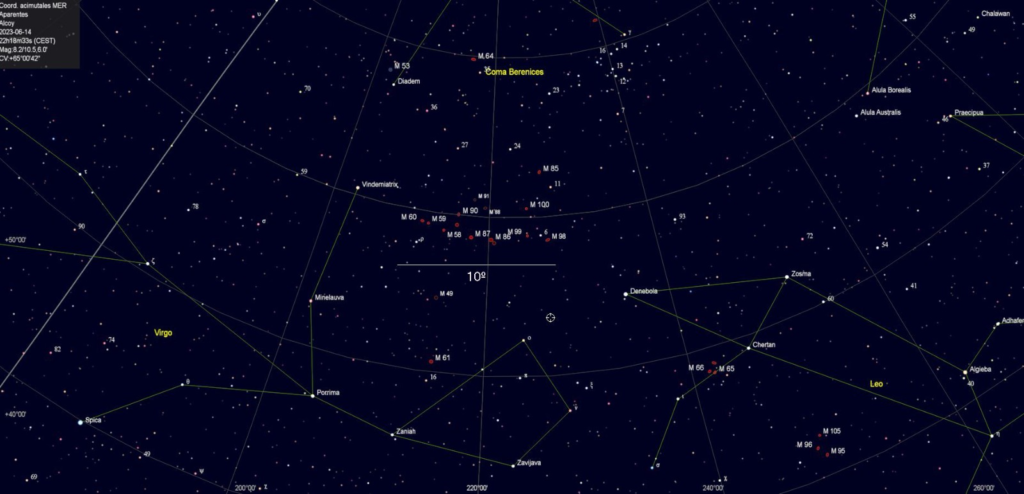
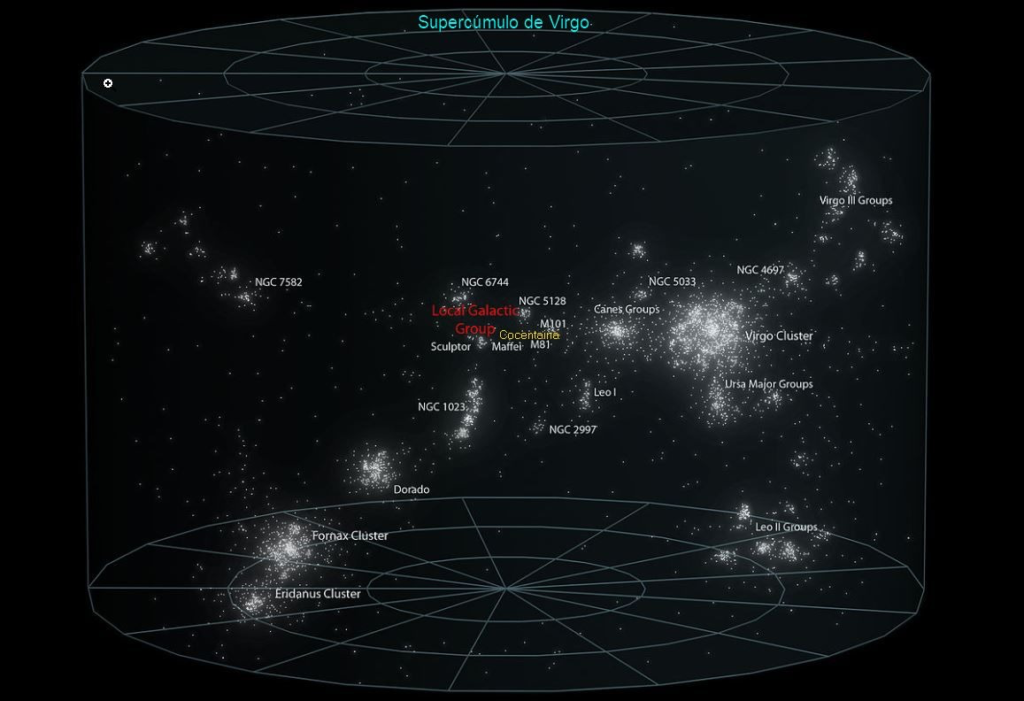
Yo lo que quería era fotografiar las Hiades, y monté un objetivo de 85 mm en la cámara ASI 1600. El conjunto cubre un campo de 12º x 9º. Pero las nubes vinieron, pasaron los días y las Hiades se fueron. Desesperado, busqué puntos rojos en campo ancho en Cartes du Ciel. Alguna zona parecida a un herpes cósmico. Me fijé en la región situada entre Leo, Virgo y Coma, que resultó ser el Cúmulo de Virgo, más de 1300 galaxias en alegre convivencia a 60 millones de años luz, repartidas en un arco de 8º. En su interior, la famosa Cadena de Markarian, una curva de galaxias que se mueven juntas al baño, y alguna otra que solo estaba allí comprando el pan.
Tanto el cúmulo como nuestro grupo local están en el Supercúmulo de Virgo. En su interior, nuestro grupo local se dirige hacia el cúmulo de Virgo atraído por su enorme masa. Os pongo el mapa por si os lo pasáis de largo sin daros cuenta.
Con un campo tan ancho y apuntando bajo, las carrascas se abalanzaban pronto sobre el cúmulo. Tomar 3 h y 44 min en RGB me costó cinco noches, y hasta ahí pude llegar sin cometer delitos ecológicos. En la región hay IFN, pero era inútil intentar pescarlo, así que el procesado no ha sido difícil. Lo peor ha sido optar por sacrificar algún detalle por una imagen más llamativa. La resolución es baja (9,2 seg/pix), de modo que apilé con drizzle, e hice todo el procesado con la imagen resultante de 9000 x 7000 (745 MB cada una). Solo reduje la imagen al final. El recorte final tiene 11º 17’ x 8º 21’. La imagen está repleta de galaxias pequeñitas A veces se considera a M87 el centro del cúmulo, pero yo he plantado en el centro la Cadena de Markarian por motivos estéticos. Le he echado bastante contraste y color para intentar animar la cosa. Muchas de las pequeñas galaxias son muy conocidas en versión Big Mac. Además de las Messier, están las galaxias de los ojos y las de los gemelos siameses. Por el contrario, en la imagen anotada se localizan galaxias que apenas son un punto.
No se si es por la costumbre de usar muchos aumentos o por el mal seeing, pero el detalle me decepciona un poco. Lo de resolver galaxias en unos cuantos píxeles y las estrellas cuadradas no me apaña mucho Los grandes campos con objetos grandes son resultones, pero con objetos pequeños hay que tener imaginación. Iremos probando.